Робот-пылесос не возвращается на базу
- Ремонт от 1 часа
- Выезд на дом за 30 минут
- Гарантия на работы и запчасти
 Не возвращается на базу
Не возвращается на базу
Порядок работы

Заявка
в сервисный центр
Позвоните по телефону +7 495 134-40-91 или оставьте свои контакты в любой форме обратной связи. Заявки принимаются ежедневно, с 7:00 до 23:00

Выезд
мастера
В назначенное время к вам приедет мастер. Время приезда варьируется от 30 минут до 1 часа. Мастера выезжают по адресам в Москве и до 30 км от МКАД, с 9:00 до 21:00.

Бесплатная
диагностика
Мастер проведет обязательную, но бесплатную диагностику. После нее он точно скажет вам, что сломалось и сколько будет стоить ремонт.

Проведение
ремонта
В случае вашего согласия, мастер проведет ремонт вашей техники. После окончания ремонта вы получите гарантию на выполненные работы сроком до 1 года.
Оригинальные запчасти
Используем только фирменные комплектующие, так как это залог качественного ремонта. Уверены в качестве запчастей и даем на них гарантию.
Гарантия на ремонт
Даем гарантию на работы и устраняем неполадки в течение гарантийного срока за свой счет.
Хорошие мастера
Не пользуемся чужим незнанием устройства техники. Подробно рассказываем, что сломалось и какие работы будут выполнены.
Ремонтируем
любых брендов
Почему робот-пылесос не возвращается на базу?

В наш сервисный центр регулярно поступают устройства с типичной неисправностью: робот пылесос не видит базу и останавливается рядом с ней. Владельцы часто не знают, что делать, когда техника начинает кружить по комнате, не может найти верный маршрут или встать на зарядку. Проблема осложняется, если устройство выключается в труднодоступных зонах под мебелью. Причина сбоя обычно кроется в дефектах датчиков, износе батареи или нарушении условий эксплуатации, которые выявляет мастер при диагностике.
Сбои в системе навигации
Робот строит карту помещения с помощью лидаров LIDAR или камер vSLAM. Если лидар сканирует нестабильно, навигация сбивается. Пылесос продолжает убирать, но не всегда может найти обратный маршрут при смещении координат. Часто гаджет теряет путь после переноса в другую комнату: гироскоп сбивает точку отсчета, и робот не узнает локацию.
Неправильное расположение базы

Робот-пылесос не видит док-станцию, если она установлена неверно. Станция должна находиться вплотную к стене на ровном полу для прямой видимости ИК-маяка:
- Производитель требует оставлять свободное место: минимум 0,5 метра по бокам.
- Для финального маневра парковки нужно не менее 1,5 метра спереди.
- Неудачное размещение базы в нишах или под мебелью глушит сигнал.
- Зеркала и глянец рядом с доком искажают луч и создают ложные цели.
При диагностике мастер убеждается в корректной работе питания базы и контактов. Wi‑Fi влияет на приложение и обновления, возврат на базу у большинства моделей работает автономно. Инженер проверяет розетку, чтобы исключить скачки напряжения и сбои маяка.
Проблемы с аккумулятором
Ресурс Li-ion батареи — порядка 300–800 циклов и зависит от условий. По мере износа аккумулятор теряет емкость, и роботу не хватает энергии на возврат. Роботу не хватает энергии на возврат: порог отключения задает электроника BMS; для пакетов 14,4В он обычно около 12В, после чего работа прекращается. Если зарядка АКБ нестабильна из-за старых ячеек, контроллер питания неверно рассчитывает время и сбивает навигацию.
Препятствия на пути пылесоса

Пылесос застревает, если покрытие пола слишком сложное. Большинство моделей преодолевают пороги примерно до 15–20 мм, по спецификации модели:
- На высоких барьерах устройство может останавливаться и буксовать; ориентируемся на высоту порога из мануала.
- Датчики перепада высот воспринимают черные ковры как глубокий обрыв и блокируют ход.
- Колеса со стертым протектором скользят, и робот не может заезжать на пандус базы.
- Намотанные волосы и провода перегружают ходовые двигатели.
Инженер при осмотре проверяет механизмы на наличие посторонних предметов. Часто специалисты извлекают из центральной щетки намотанные кабели, которые блокируют движение.
Сбои программного обеспечения
Робот-пылесос не видит базу при ошибках в навигационном кеше. Сбой ПО смещает виртуальную карту, и робот теряется. Мастер устраняет проблему принудительной перезагрузкой или сбросом до заводских настроек. При повреждении прошивки контроллера специалист выполняет перепрошивку через сервисный интерфейс.
Загрязнение или поломка датчиков
Точная стыковка зависит от пары «инфракрасный передатчик базы — приемник бампера». Грязная оптика ухудшает прием сигнала базы и расстояние распознавания:
- Пыль на пластике корпуса глушит ИК-луч.
- Руководства производителей рекомендуют протирать датчики и контактные группы регулярно.
- Помутнение пластика от времени ухудшает чувствительность сенсоров.
Если профессиональная чистка не восстановила связь, вероятна поломка компонентов. Мастер проверяет целостность шлейфа от платы датчиков к материнской плате.
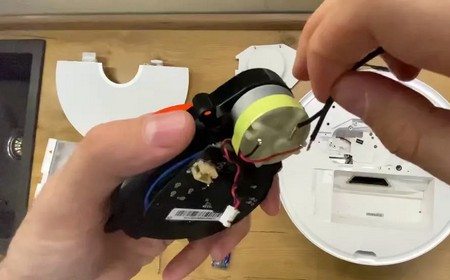
Ремонт робота-пылесоса в СЦ

Если чистка не помогла, нужен ремонт. В сервисе мастер использует мультиметр и осциллограф для диагностики сигнальных цепей. Специалист последовательно проверяет узлы:
- Навигация. Мастер оценивает питание и ход мотора лидара на стенде. Если датчик неисправен, инженер меняет лазерную головку.
- Питание. Если потерян контакт с базой, мастер зачищает ламели или меняет контактную группу. Мастер замеряет входное напряжение — по спецификации модели (обычно 19–22,5 В).
- АКБ. Специалист тестирует сопротивление батареи. При заметной деградации мастер делает замену на новый оригинальный блок емкостью 2600–5200 мАч.
- Профилактика. Инженер удаляет спрессованную пыль внутри корпуса. Из-за неправильной вентиляции возможен перегрев электроники.
- ПО. Инженер обновляет прошивку и калибрует гироскоп, чтобы устанавливать стабильную связь.
- ЗУ. Если напряжение на выходе не соответствует спецификации, мастер ремонтирует зарядный блок и цепи управления базы.
Комплексный ремонт гарантирует устранение первопричины сбоев и стабильную работу.
Преимущества обращения в наш СЦ
Центр сервисов «Руки из плеч» чинит робототехнику любой сложности. Курьер бесплатно забирает аппарат. Рабочее место инженера укомплектовано всем необходимым для оперативного восстановления гаджетов.
Инженеры начинают замену компонентов сразу после согласования с заказчиком. Официальная гарантия до 2 лет дает уверенность владельцу. Робот-пылесос возвращается полностью исправным и готовым к работе.
Ответы на вопросы
Вызвать мастера
перезвоним в течение 1 минуты